CK3M ve CK5M
Programlanabilir Çok Eksenli Kontrolör
50 µs/5 eksen değeriyle en hızlı servo döngü süresine sahip çok eksenli kontrol, hassas mekanik işleme sağlar
- Ölçeklenebilir Hareket Kontrolörü CPU Aralığı:
CK3M (1,0 GHz, 2 Çekirdek), CK5M (1,6 GHz, 4 çekirdek) - Nano ölçek hassasiyeti için yerel eksenler
- Ultra yüksek hızlı senkronize kontrol (50 µs/5 eksen)
- Özel servo regülasyon algoritmaları
- Çoklu tedarikçi aktüatörleri ve enkoderleri kullanma esnekliği
- G kodu, ANSI C ve PMAC Komut Dosyası dilleriyle esnek programlama
- Esnek konfigürasyon için EtherCAT
- Standart TCP/IP Ethernet haberleşme
- Açık Protokoller: MQTT yayıncı/abone ve OPC-UA sunucusu, Ethernet IP Adaptörü ve Modbus TCP İstemci/Sunucu
- Modüler tasarım ve DIN rayı montajı
Özellikler ve sipariş bilgisi
| Ürün | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Açıklama | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, No EtherCAT. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 4 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 8 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder Input Unit for CK3M, Serial encoder 4 channels, BiSS-C, Endat2.2, and R88M-1Lx/-1Mx Motor built-in encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, PNP |
|
Yardıma mı ihtiyacınız var?
Yardımcı olmak için buradayız! Bize ulaşın, uzmanlarımız işletmeniz için en iyi çözümü bulmanıza yardımcı olsun.
İletişime geçin CK3M ve CK5M

Teşekkür ederiz. Talebiniz konusunda en kısa sürede bilgilendirileceksiniz.
Teknik zorluklar yaşamaktayız. Form gönderme işleminiz başarılı olmadı. Lütfen özürlerimizi kabul edin ve daha sonra tekrar deneyin. Detaylar: [details]
Için teklif CK3M ve CK5M
Bu form ile seçtiğiniz ürün için bir teklif isteyebilirsiniz. * ile işaretli bölümleri doldurmak zorunludur. Kişisel bilgileriniz gizli kalacaktır.
Talebiniz için teşekkür ederiz. En kısa zamanda size bilgi verilecektir.
Teknik zorluklar yaşamaktayız. Form gönderme işleminiz başarılı olmadı. Lütfen özürlerimizi kabul edin ve daha sonra tekrar deneyin. Detaylar: [details]
Özellikler

Modüler tasarım
Modüler tasarım, CK3M veya CK5M'yi özgürce birleştirmenizi sağlar.
CK3M ile CK5M Karşılaştırması
CK3M ve CK5M, aynı işlevlere sahip gelişmiş hareket kontrolörleridir. Temel fark çekirdek işlemcilerinde yatar: CK3M 1,0 GHz çift çekirdekli işlemciye sahipken, CK5M daha güçlü 1,6 GHz dört çekirdekli işlemciye sahiptir.
| Maks. yerel eksen | Maks. EtherCAT eksen | |
|---|---|---|
| CK3M | 16 | 8 |
| CK5M | 32 | 32 |
Power PMAC IDE (Entegre Geliştirme Ortamı)
- Microsoft® Visual Studio® tabanlıdır
- G Kodu, ANSI C ve PMAC Komut Dosyası dilleri
- Kolay ayarlama
- Kolay ayar
- Sorun Giderme
- Hata ayıklayıcı
Karmaşık kinematik
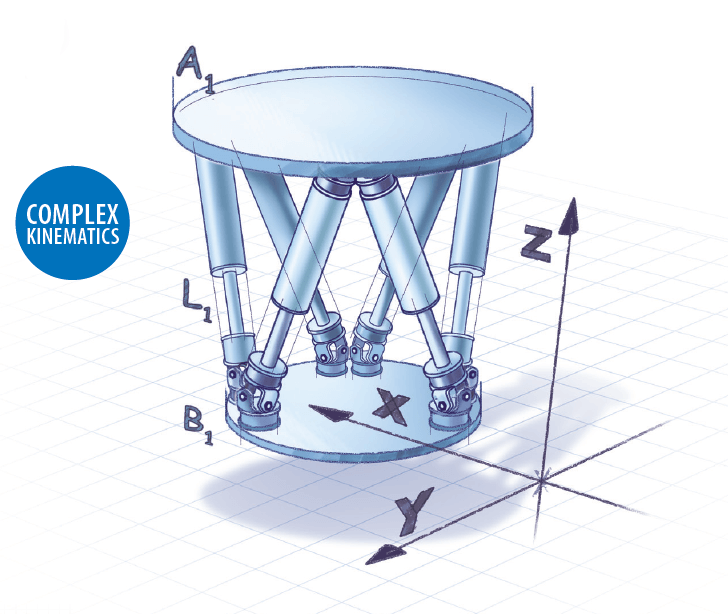
Matris işleme ve alan dönüşümleri sayesinde karmaşık mekanik komponentler kontrol edilebilir. Hexapod teleskop ayna konumlandırma gibi özel uygulamalar, kinematik taşıma fonksiyonu ile kolaylıkla çalıştırılabilir.
Doğru mekanik işleme uygulaması için güç aktarma özellikleri
G-Kodu
Standart RS-274 G Kodu yorumlayıcı. G, M, T ve D Kodlarının özelleştirilerek uygulanması için kullanıcı tarafından yazılabilir alt programlar. Söz dizimi uyarlama ve CAD/KAM yazılımlarıyla birlikte çalışma esnekliği.
Kesici telafisi 2D/3D
G Kodunda tam olarak belirtilen kesme noktasına eşleşme sağlayan araç çapı ve şekil telafisi.
Hızlı işlemci + geniş program arabelleği
Hızlı işlemci saniyede 10.000'den fazla blok ve 1 GB'ye kadar parça programı işleyebilir.
Yolu tersine çevirmek için Blok Geri İzleme
Yol, aracın kesme alanından kaldırılması amacıyla tersine çevrilebilir.
Gelişmiş İleri Yönlü Blok
Daha iyi bir performans için hızlı ve verimli bir şekilde arabellekteki talimatlar önceden analiz edilerek hareketler birleştirilir ve en iyi duruma getirilir.
Tanjant araç yönetimi
Kesme yönüne sahip araçlar tanjant yol konumlandırma gerektirir.
Yazılım
Power PMAC IDE
Bu bilgisayar yazılımı, NY51-A ve CK3E Programlanabilir Çok Eksenli Kontrolörlere yönelik kullanıcı programları yapılandırmak ve yaratmak ile hata ayıklamak için kullanılır.
İlgili ürünler
-

Sysmac genel amaçlı servo
-

Çok Çeşitli Motor Uygulamaları için Hassas Kontrol
-

CK3E Programlanabilir Çok Eksenli Kontrol Ünitesi
-

Makine kontrol performansı ve kolaylığı
Dosya indirme









_getting_started_guide_en.jpg)