
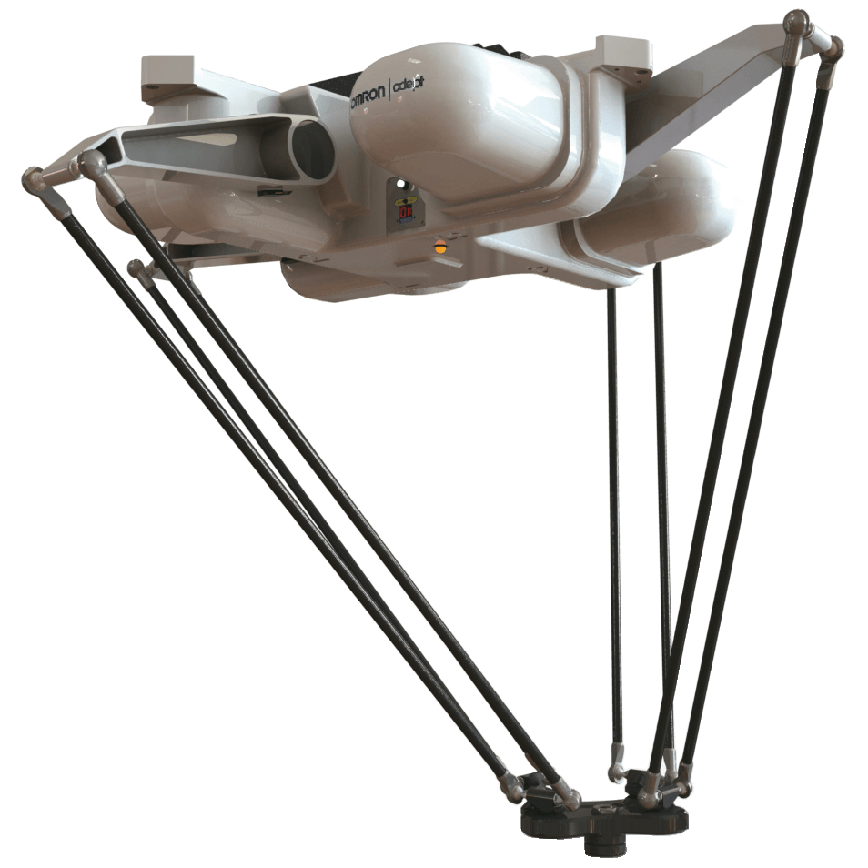
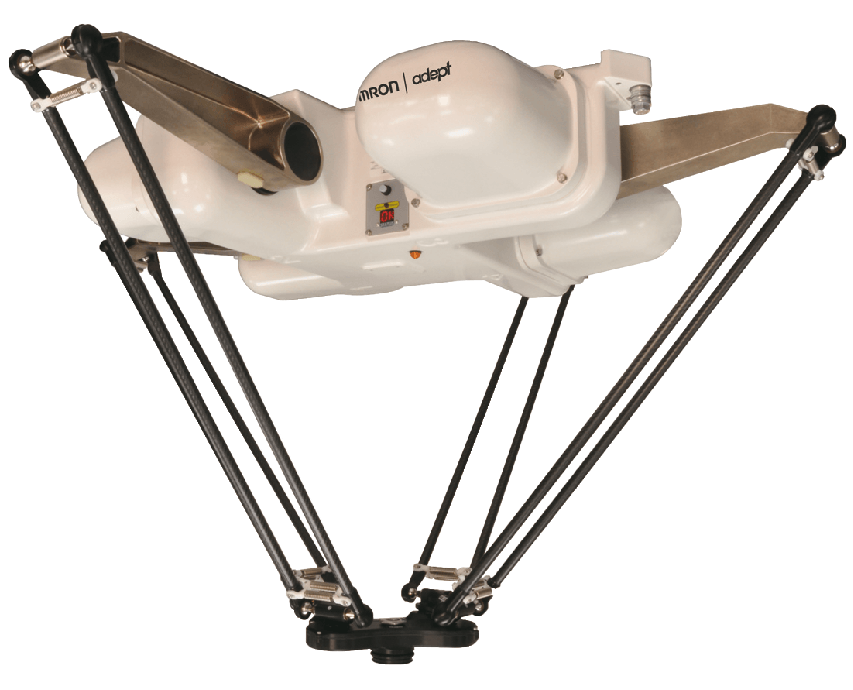
Quattro
Dört eksenli paralel robot, yüksek hıza ve hassasiyete ulaşır
- Robotun, NX/NJ makine kontrolörünün bilindik programlama diliyle (IEC 61131-3) kontrol edilmesini sağlayan Ethernet özelliği
- Dört eksenli kol, robot üzerindeki yükü eşit şekilde dağıtır
- Hızlı ve yüksek hassasiyetle taşıma ve montaj
- Çok el (çoklu alma) işlevini destekleyen yüksek taşıma kapasitesiyle tasarlanmıştır
- 650HS modeli, birincil gıda işleme alanında USDA onaylıdır
- 1300 ve 1600 çalışma aralığı modelleri
- 15 kg'a kadar maks. taşıma kapasitesi
- IP65 koruma sınıfı (HS modeli için IP66)
Özellikler ve sipariş bilgisi
| Ürün | Payload | Reach | Robot controller | Z-Stroke | Degree of protection (IP) | Rotation -/+ | Platform type | Açıklama | |
|---|---|---|---|---|---|---|---|---|---|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Quattro 650H, Add-On, 15 kg payload, 1300mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 650HS, Add-On, 8 kg payload, 1300mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 650HS, Add-On, 3 kg payload, 1300mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 650HS, Add-On, 3 kg payload, 1300mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 650HS, Add-On, 3 kg payload, 1300mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 650H, Add-On, 15 kg payload, 1300mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 650H, Add-On, 6 kg payload, 1300mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP65 Base, IP67 Tooling, ePLC |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Quattro 800H, Add-On, 10 kg payload, 1600mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Quattro 800H, Add-On, 4 kg payload, 1600mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 800H, Add-On, 4 kg payload, 1600mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Quattro 800H, Add-On, 4 kg payload, 1600mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP20 Base, IP67 Tooling, ePLC |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 800HS, Add-On, 7 kg payload, 1600mm diameter reach, P30, 0º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 800HS, Add-On, 1 kg payload, 1600mm diameter reach, P31, 46.25º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 800HS, Add-On, 1 kg payload, 1600mm diameter reach, P32, 92.5º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 800HS, Add-On, 1 kg payload, 1600mm diameter reach, P34, 185º rotation, 4 axis, 500mm Zaxis, IP67 Base, IP67 Tooling, ePLC, USDA |
|
Aksesuarlar
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Robot Integrated Controller | 16 motion axis, up to 8 robots control | NJ501-R300 |
| 32 motion axis, up to 8 robots control | NJ501-R400 | ||
| 64 motion axis, up to 8 robots control | NJ501-R500 | ||
 |
Robot Controller | SmartController EX | 19200-000 |
| SmartController EX + Front Panel | 19300-000 | ||
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
| Sysmac Studio 3D Simulation option | SYSMAC-SA4 |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Yardıma mı ihtiyacınız var?
Yardımcı olmak için buradayız! Bize ulaşın, uzmanlarımız işletmeniz için en iyi çözümü bulmanıza yardımcı olsun.
İletişime geçin Quattro

Teşekkür ederiz. Talebiniz konusunda en kısa sürede bilgilendirileceksiniz.
Teknik zorluklar yaşamaktayız. Form gönderme işleminiz başarılı olmadı. Lütfen özürlerimizi kabul edin ve daha sonra tekrar deneyin. Detaylar: [details]
Için teklif Quattro
Bu form ile seçtiğiniz ürün için bir teklif isteyebilirsiniz. * ile işaretli bölümleri doldurmak zorunludur. Kişisel bilgileriniz gizli kalacaktır.
Talebiniz için teşekkür ederiz. En kısa zamanda size bilgi verilecektir.
Teknik zorluklar yaşamaktayız. Form gönderme işleminiz başarılı olmadı. Lütfen özürlerimizi kabul edin ve daha sonra tekrar deneyin. Detaylar: [details]
Delta Robot Serisi
Quattro 800H
- Nominal çalışma aralığı: Ø 1600 x 215 mm (Maks. 500 mm)
- Maks. taşıma kapasitesi aralığı: 4 - 10 kg
- Eksen sayısı: 4
- IP65 (isteğe bağlı kablo yalıtım kiti dahil)
Quattro 650H/HS
- Nominal çalışma aralığı: Ø 1300 x 215 mm (Maks. 500 mm)
- Maks. taşıma kapasitesi aralığı: 3 - 15 kg
- Eksen sayısı: 4
- IP65 (isteğe bağlı kablo yalıtım kiti dahil), IP66 HS modeli
- Quattro 650HS, birincil gıda işleme alanında USDA onaylıdır
Kontrol Üniteleri
Videolar

-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.İlgili ürünler
-

Paralel robot, gıda ve içecek, ilaç ve sağlık endüstrilerinde kullanım için idealdir
-

Paralel robot; yiyecek ve içecek ile ilaç ve sağlık sektörlerinde kullanım için idealdir
-

Dört eksenli paralel robot, yüksek hıza ve hassasiyete sahiptir
Dosya indirme







_getting_started_guide_en.jpg)


_users_manual_en.jpg)














